Internal Connectors
The following connectors are detailed here for your information, but are not available without dismantling the hand.
Fingers
The connectors in the fingers are can be exposed by removing the four screws on the back of the proximal phalange, using an orange hex driver. The board is available in two versions
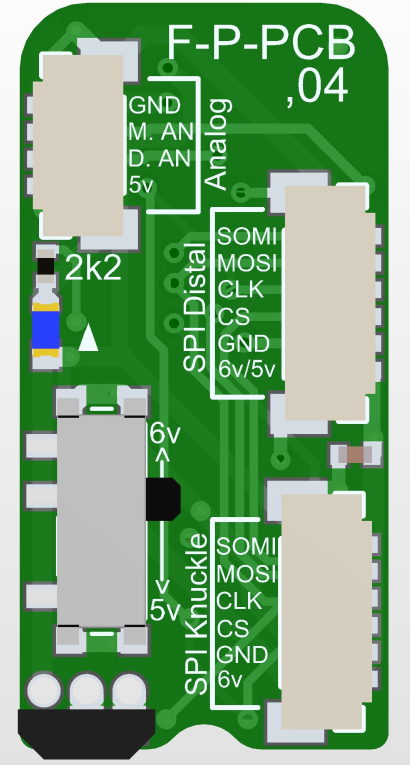
SPI to Palm: This consists of two 3-way connectors, and connects the Palm MCU to the finger.
MID Analog: This connects the two Hall effect sensors in the middle phalange to this PCB.
SPI to Tactile Sensor: This connects the tactile sensor to this PCB. The plug is JST 06SUR-32S. I/O signals are expected to be 3.3V compatible. The 5V/6V selector switch sets the power supplied to the Tactile Sensor
Tactile Sensor Connector: This is an analogue input, accepting three resistive sensors.
Palm
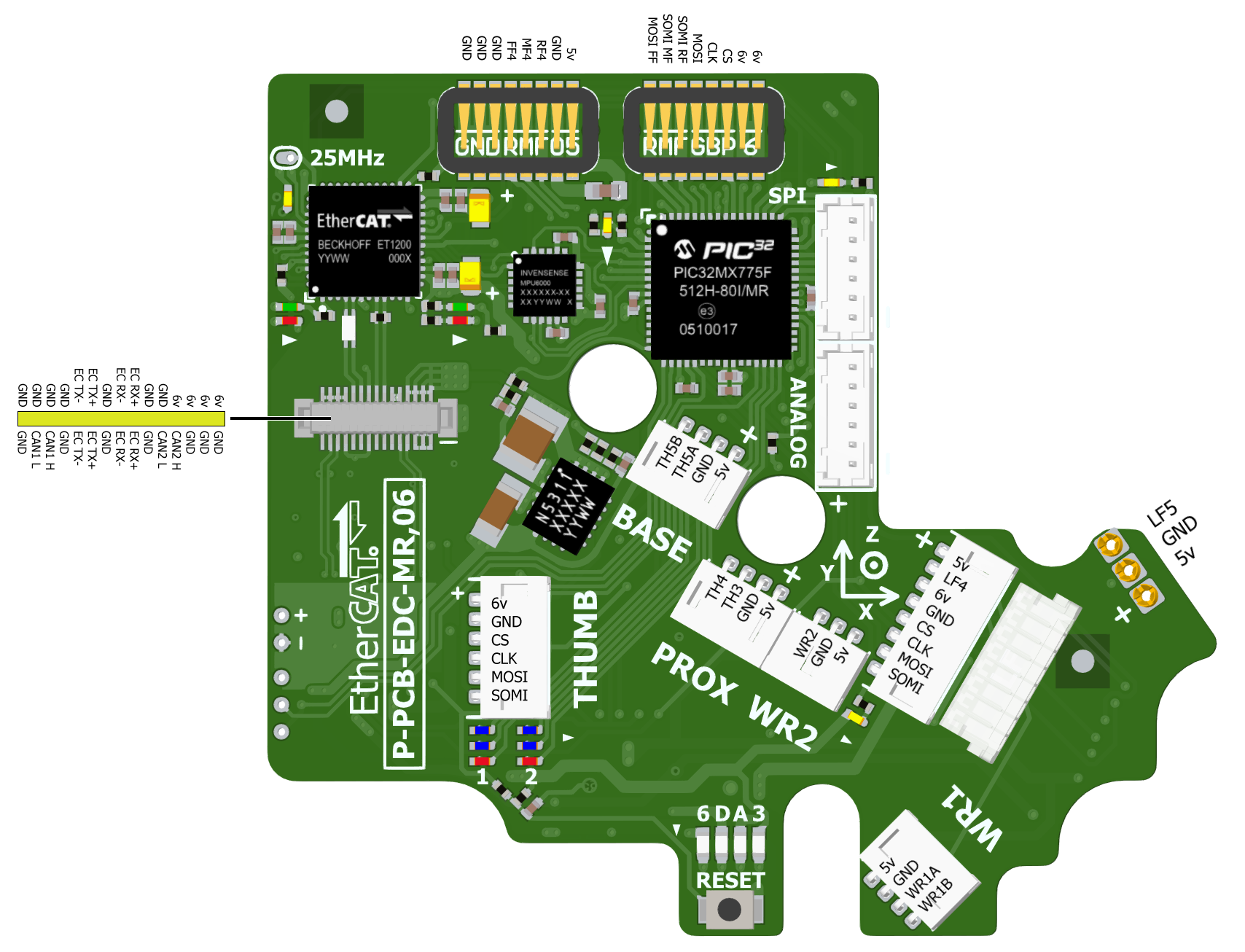
EtherCAT Dual CAN connector: This connector supplies power to the palm, as well as connecting the EtherCAT LVDS and both CAN buses.