Command Line Interface
All functions of the hand are available from the command line.
In the following sections, Hand refers to the shadow dexterous hand and Host refers to the host computer which is controlling the hand. Assume that all the topics are read-only unless specified otherwise.
Using rostopic
To check how to interact with ROS topics, see this link.
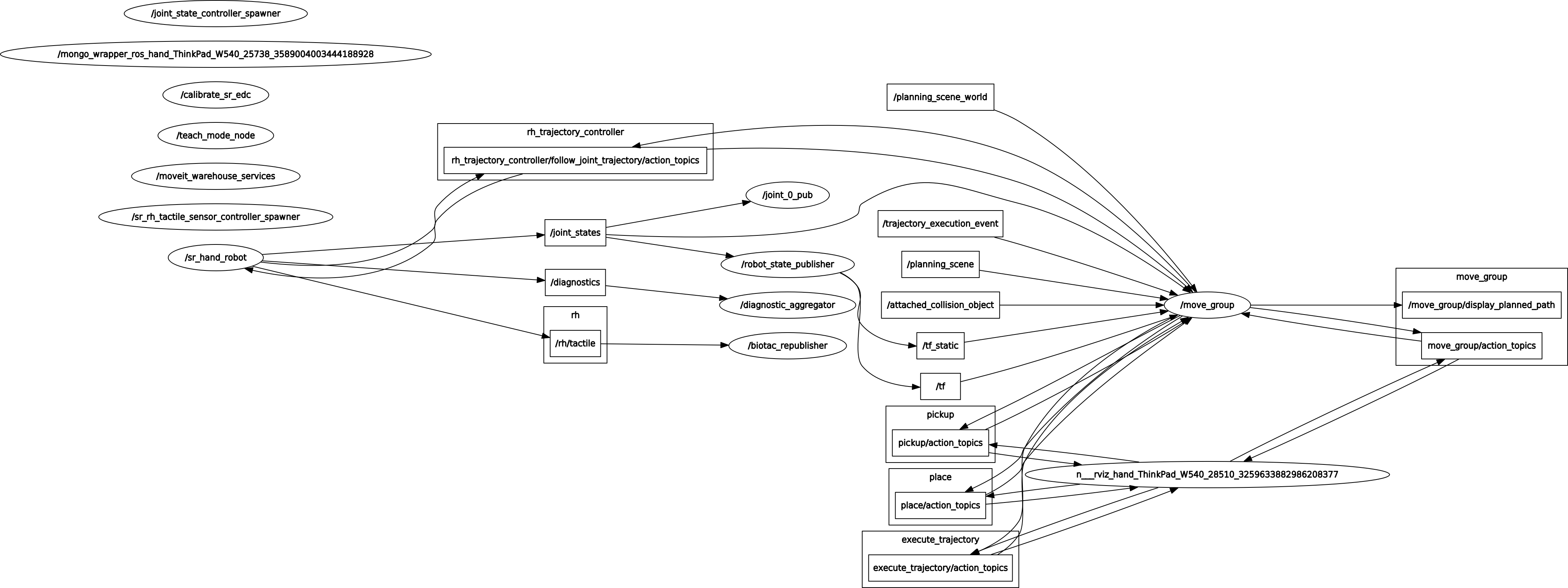
The following rqt_graph shows the flow of topics between nodes whilst the hand is running.
Here is a list of the available topics:
Calibration (Real hand only)
These topics are used during the Hand startup routine to make sure that the Hand is calibrated:
/cal_sh_rh_*/calibrated
/calibrated
An empty message is published to the /cal_sh_rh_**/calibrated* topics for each joint when they are calibrated. The /calibrate_sr_edc node subscribes to these topics and when all of them have had an empty message published to them, it publishes True to the /calibrated topic. Before empty messages have been received by all the joints it publishes False to the /calibrated topic.
Diagnostics (Real hand only)
/diagnostics
/diagnostics_agg
/diagnostics_toplevel_state
These topics update at 2 Hz with information on each joint’s Temperature, Current, Measured effort and Command effort, as well as information about the EtherCat devices and firmware version.
Joint states
/joint_states
This topic is read-only and updates at 125 Hz with the name, position, velocity and effort values of all joints in a Hand.
Example topic message:
name: [rh_FFJ1, rh_FFJ2, rh_FFJ3, rh_FFJ4, rh_LFJ1, rh_LFJ2, rh_LFJ3, rh_LFJ4, rh_LFJ5,
rh_MFJ1, rh_MFJ2, rh_MFJ3, rh_MFJ4, rh_RFJ1, rh_RFJ2, rh_RFJ3, rh_RFJ4, rh_THJ1,
rh_THJ2, rh_THJ3, rh_THJ4, rh_THJ5, rh_WRJ1, rh_WRJ2]
position: [1.279751244673038, 1.7231505348398373, 1.2957917583498741, -0.00406710173435502, 0.054689233814909366, 1.253488840949725, 1.5395435039130654, 0.02170017906073821, 0.1489674305718295, 1.08814400717011, 1.638917596069165, 1.4315445985097324, 0.00989364236002074, 1.2257618075487349, 1.8331224739256338, 1.2888368284819698, -0.13269012433948385, 0.14435534682895756, 0.6980816915624072, 0.18782898954368935, 1.124295322901818, 0.21905854304869088, -0.048455186771971595, -0.0032803323337213066]
velocity: [-7.484333985952662e-06, -7.484333985952662e-06, 0.0023735860019749185, 0.00062181267775619, -0.0005871136552505063, -0.0005871136552505063, 0.0020967687295392933, 0.0001739028157522596, 0.0004985252400775274, -9.485516545601461e-06, -9.485516545601461e-06, -0.0007068752456452666, -0.0012475428276090576, 0.0008426052935621657, 0.0008426052935621657, 0.001237001167977189, -0.0026444893567459573, 0.0025260047430310925, -0.0003217106977882921, 6.159570145597239e-05, -0.0023454723015513593, 0.0009436399232442155, 0.00017469681801687975, -4.900148416020751e-05]
effort: [-1.3660655058510802, -1.3660655058510802, -2.030169817308198, -1.9577332816789155, 0.0, 0.0, -17.29928766980003, -1.5006516553524243, -1.8579749510438912, -1.504877130092884, -1.504877130092884, -0.3374653182042338, -1.6492254479379729, -8.476660697182016, -8.476660697182016, -3.3867013328219056, -2.3404145772688683, -0.7688013735971971, 11.02319645071454, 0.8482082620071664, 0.08818910881575533, 1.127772119947565, -2.2344970991165316, -3.5544023107705667]
etherCAT (Real hand only)
/rh/debug_etherCAT_data
This topic is published by the driver and updates at 1000 Hz with data from the Hand as it is received over EtherCAT, which is useful for debugging.
sensors are the position sensors in the joints, which are included in every packet.
tactile is the data from the tactile sensors, which are included in every packet.
Data is received in two alternative packets for the motor torques, each holds data for half of the 20 motors. If which_motors is 0 then the data is for the first 10 motors. If 1, the data is for the second 10 motors.
motor_data_packet_torque is the raw difference between the strain gauge in tension and the strain gauge in compression for each motor.
motor_data_type is used to specify the data in motor_data_packet_misc. This data has been requested from the host. Which value corresponds to which data is defined here.
which_motor_data_arrived is a bitmap, 20x1 demensional array for the 20 motors, which shows which motors data has been received from. For example 349525 = 01010101010101010101.
which_motor_data_had_errors is a bitmap for the motors which have errors.
The tactile sensors attached to the Hand are selected during startup, their corresponding values are here.
tactile_data_type is used to specify the data in tactile, similar to motor_data_type and motor_data_packet_misc. In the Example topic message below the PST fingertip sensors are used, its value is refered here.
tactile_data_valid is a bitmap for the 5 sensors that is 1 when there are no errors.
idle_time_us is the time margin once the Hand has completed its processing and is ready to communicate on the EtherCAT bus.
Note
More data is transmitted from the tactile sensors than is published to the etherCAT topic by default.
Example /rh/debug_etherCAT_data topic message:
header:
seq: 176798
stamp:
secs: 1528812878
nsecs: 323410491
frame_id: ''
sensors: [1303, 1574, 3205, 1780, 1382, 1523, 3164, 1938, 904, 1332, 2977, 1706, 1730, 1434, 3060, 1853, 1955, 1814, 2132, 2294, 2496, 4029, 1668, 2931, 1768, 1377, 26, 27, 28, 29, 30, 31, 0, 19, 8, 9, 0]
motor_data_type:
data: 3
which_motors: 0
which_motor_data_arrived: 349525
which_motor_data_had_errors: 0
motor_data_packet_torque: [15, -31, -4, 3, 0, 0, -207, -3, -55, -3]
motor_data_packet_misc: [-105, -47, 0, -39, 0, 0, 120, 0, 79, 0]
tactile_data_type: 0
tactile_data_valid: 31
tactile: [407, 429, 416, 398, 389]
idle_time_us: 430
---
header:
seq: 176799
stamp:
secs: 1528812878
nsecs: 324399217
frame_id: ''
sensors: [1303, 1574, 3205, 1780, 1382, 1523, 3164, 1938, 904, 1332, 2977, 1706, 1731, 1434, 3060, 1853, 1955, 1814, 2131, 2294, 2496, 4030, 1669, 2931, 1768, 1376, 26, 27, 28, 29, 30, 31, 19, 10, 0, 0, 0]
motor_data_type:
data: 4
which_motors: 1
which_motor_data_arrived: 699050
which_motor_data_had_errors: 0
motor_data_packet_torque: [-29, -3, 1, -35, -1, -22, -18, 35, 4, 5]
motor_data_packet_misc: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
tactile_data_type: 0
tactile_data_valid: 0
tactile: [407, 429, 416, 398, 389]
idle_time_us: 394
Palm Extras
/rh/palm_extras
This topic updates at 84 Hz with data from additional devices plugged into the palm.
Example topic message:
layout:
dim:
-
label: "accelerometer"
size: 3
stride: 0
-
label: "gyrometer"
size: 3
stride: 0
-
label: "analog_inputs"
size: 4
stride: 0
data_offset: 0
data: [26.0, 27.0, 28.0, 29.0, 30.0, 31.0, 4.0, 5.0, 0.0, 8.0]
The first six values are readings from an IMU set in the hand. The IMU is an add-on feature so some hands might not have this data available.
Tactile (Only for a real hand with tactile sensors)
/rh/tactile
This topic is published by the driver at 100 Hz with data from tactile sensors.
Example topic message when using PST fingertip sensors:
header:
seq: 126618
stamp:
secs: 1528813967
nsecs: 440903704
frame_id: "rh_distal"
pressure: [405, 428, 422, 401, 384]
temperature: [1224, 1198, 1225, 1242, 1266]
Example topic message when using BioTac fingertip sensors:
tactiles:
-
pac0: 2048
pac1: 2054
pdc: 2533
tac: 2029
tdc: 2556
electrodes: [2622, 3155, 2525, 3062, 2992, 2511, 3083, 137, 2623, 2552, 2928, 3249, 2705, 3037, 3020, 2405, 3049, 948, 2458, 2592, 3276, 3237, 3244, 3119]
-
pac0: 0
pac1: 0
pdc: -9784
tac: 32518
tdc: 0
electrodes: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
-
pac0: 0
pac1: 0
pdc: -9784
tac: 32518
tdc: 0
electrodes: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
-
pac0: 0
pac1: 0
pdc: -9784
tac: 32518
tdc: 0
electrodes: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
-
pac0: 0
pac1: 0
pdc: -9784
tac: 32518
tdc: 0
electrodes: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
BioTac (Only for a real hand with Biotac tactile sensors)
These topics are read-only and updated at 100 Hz with data from the biotac sensors, which comprises their pressure, temperature and electrode resistance. This topic is published from the /biotac_republisher node which receives this data from the driver via the /rh/tactile topic. For further information about the biotacs, refer to their documentation
Example /rh/biotac_** topic message:
pac0: 2056
pac1: 2043
pdc: 2543
tac: 2020
tdc: 2454
electrodes: [2512, 3062, 2404, 2960, 2902, 2382, 2984, 138, 2532, 2422, 2809, 3167, 2579, 2950, 2928, 2269, 2966, 981, 2374, 2532, 3199, 3152, 3155, 3033]
Trajectory Controller
Finger Trajectory Controller
Command
/rh_trajectory_controller/command
This topic can be published to and is the set position for the fingertrajectory controller. It comprises an array of all the joints set positions and is used for commanding the robot. For example the rqt joint sliders publish to it.
Example topic message:
joint_names: [rh_FFJ1, rh_FFJ2, rh_FFJ3, rh_FFJ4, rh_MFJ1, rh_MFJ2, rh_MFJ3, rh_MFJ4, rh_RFJ1, rh_RFJ2, rh_RFJ3, rh_RFJ4, rh_LFJ1, rh_LFJ2, rh_LFJ3, rh_LFJ4, rh_LFJ5, rh_THJ1, rh_THJ2, rh_THJ3, rh_THJ4, rh_THJ5] points: - positions: [0.24434609527920614, 0.8203047484373349, 0.8552113334772214, -0.17453292519943295, 1.0297442586766545, 1.4311699866353502, 1.413716694115407, 0.007182575752410699, 0.9773843811168246, 1.5707963267948966, 1.2566370614359172, -0.12217304763960307, 0.4014257279586958, 1.2566370614359172, 1.5184364492350666, 0.017453292519943295, 0.13962634015954636, 0.12217304763960307, 0.6632251157578453, 0.17453292519943295, 1.117010721276371, -0.7504915783575618] velocities: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0] accelerations: [] effort: [] time_from_start: secs: 0 nsecs: 5000000
State
/rh_trajectory_controller/state
This topic is read-only and updates at 50 Hz from the trajectory controller with the positions and velocities of the 20 finger joints.
Example topic message:
header: seq: 29135 stamp: secs: 583 nsecs: 274000000 frame_id: '' joint_names: - rh_FFJ1 - rh_FFJ2 - rh_FFJ3 - rh_FFJ4 - rh_LFJ1 - rh_LFJ2 - rh_LFJ3 - rh_LFJ4 - rh_LFJ5 - rh_MFJ1 - rh_MFJ2 - rh_MFJ3 - rh_MFJ4 - rh_RFJ1 - rh_RFJ2 - rh_RFJ3 - rh_RFJ4 - rh_THJ1 - rh_THJ2 - rh_THJ3 - rh_THJ4 - rh_THJ5 desired: positions: [0.00011967184218224583, 0.0005548183242297389, 0.00041894754950187046, -0.10062701434085283, 8.783502460599571e-05, 0.0004641775977824551, 0.0006856740495884452, 0.1096183605452164, 0.004913053249636874, 0.00010239955504565482, 0.00047931794332974065, 0.00013111648840283263, -0.10127973823850217, 8.996037101196772e-05, 0.0004488761418596776, 0.0001876294034980873, 0.1001350676276958, -0.035240921470978015, -0.31784852833458305, 0.0007460299926848393, 0.04911052560971607, -0.0002772503508325329] velocities: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0] accelerations: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0] effort: [] time_from_start: secs: 0 nsecs: 0 actual: positions: [7.10895251927468e-05, 0.0006767078325600195, 0.0004175216727215769, -0.10062678076768616, -0.00027645955245603204, 0.0005525155619778843, 0.0006916863497421488, 0.10961843159979079, 0.004913188891993769, 4.852612279648838e-05, 0.0005853580394772351, 0.00013062204099512087, -0.10127949778047185, -3.317031927352332e-06, 0.0005469772724389088, 0.00018736835619481695, 0.10013483724669392, -0.03524090059726159, -0.31784850071453175, 0.000746036136888506, 0.04911112453716715, -0.0002772527343921638] velocities: [0.08902813995150381, -0.001099212107393761, 0.006855683840805191, 0.030914854686922167, -0.2850721338474761, 0.009299471978875831, 0.0092727557285639, -0.034998219897310806, 0.006294029941129844, -0.004965571363457199, 0.0018022999079858118, 0.009204137459833733, 0.03093467522055917, -0.007240949470287823, -0.00034343975205673206, 0.008327083950443404, -0.02997268098080695, 0.07474706451076522, 0.6818870795543708, -0.003969150639010634, -0.013970489880483824, 0.02504911604093861] accelerations: [] effort: [] time_from_start: secs: 582 nsecs: 721000000 error: positions: [4.85823169893429e-05, -0.0001218895083301419, 1.425876780203339e-06, -2.3357316658589866e-07, 0.00036429457706210755, -8.833796419560613e-05, -6.012300153734884e-06, -7.105457422440509e-08, -1.3564235690211035e-07, 5.3873432249051945e-05, -0.0001060400961474528, 4.944474079060512e-07, -2.404580303760895e-07, 9.327740293940678e-05, -9.810113057939773e-05, 2.6104730332932036e-07, 2.3038100183114807e-07, -2.087371653303194e-08, -2.762005113510213e-08, -6.144203812397109e-09, -5.989274511897236e-07, 2.3835595719390312e-09] velocities: [-0.08902813995150381, 0.001099212107393761, -0.006855683840805191, -0.030914854686922167, 0.2850721338474761, -0.009299471978875831, -0.0092727557285639, 0.034998219897310806, -0.006294029941129844, 0.004965571363457199, -0.0018022999079858118, -0.009204137459833733, -0.03093467522055917, 0.007240949470287823, 0.00034343975205673206, -0.008327083950443404, 0.02997268098080695, -0.07474706451076522, -0.6818870795543708, 0.003969150639010634, 0.013970489880483824, -0.02504911604093861] accelerations: [] effort: [] time_from_start: secs: -583 nsecs: 279000000
follow_joint_trajectory
These topics provide information about positions, velocities and accelerations of joints whilst executing a trajectory from the current pose to the goal pose:
/rh_trajectory_controller/follow_joint_trajectory/feedback /rh_trajectory_controller/follow_joint_trajectory/goal /rh_trajectory_controller/follow_joint_trajectory/result /rh_trajectory_controller/follow_joint_trajectory/status
The following topic is used to stop a currently executing trajectory:
/rh_trajectory_controller/follow_joint_trajectory/cancel
Wrist Trajectory Controller
Command
/rh_wr_trajectory_controller/command
This topic can be published to and is the set position for the wrist trajectory controller. It comprises an array of all the joints set positions and is used for commanding the robot. For example the rqt joint sliders publish to it.
Example topic message:
joint_names: [rh_WRJ1, rh_WRJ2] points: - positions: [-0.03490658503988659, 0.0] velocities: [0.0, 0.0] accelerations: [] effort: [] time_from_start: secs: 0 nsecs: 5000000
State
/rh_wr_trajectory_controller/state
This topic is read-only and updates at 50 Hz from the trajectory controller with the positions and velocities of the wrist joints.
Example topic message:
header: seq: 23029 stamp: secs: 461 nsecs: 154000000 frame_id: '' joint_names: - rh_WRJ1 - rh_WRJ2 desired: positions: [0.12041453184118814, 0.17462944274957784] velocities: [0.0, 0.0] accelerations: [0.0, 0.0] effort: [] time_from_start: secs: 0 nsecs: 0 actual: positions: [0.12041412527154005, 0.17453432025078097] velocities: [-0.006723029810312021, 8.480557225661457e-05] accelerations: [] effort: [] time_from_start: secs: 460 nsecs: 601000000 error: positions: [4.065696481703185e-07, 9.51224987968402e-05] velocities: [0.006723029810312021, -8.480557225661457e-05] accelerations: [] effort: [] time_from_start: secs: -461 nsecs: 399000000
follow_joint_trajectory
These topics provide information about positions, velocities and accelerations of joints whilst executing a trajectory from the current pose to the goal pose:
/rh_wr_trajectory_controller/follow_joint_trajectory/feedback /rh_wr_trajectory_controller/follow_joint_trajectory/goal /rh_wr_trajectory_controller/follow_joint_trajectory/result /rh_wr_trajectory_controller/follow_joint_trajectory/status
The following topic is used to stop a currently executing trajectory:
/rh_wr_trajectory_controller/follow_joint_trajectory/cancel
Position Controller
Command
/sh_rh_*_position_controller/command
These topics can be published to and are the set position of each joint in radians. The topics are subscribed to by the driver (/sr_hand_robot node). This topic is used to communicate the set position with the rqt Joint Sliders plugin, when using position control. The Hand can be set to position control using the Change Robot Control Mode rqt plugin.
Example of running
rostopic info /sh_rh_ffj0_position_controller/commandType: std_msgs/Float64 Publishers: /rqt_gui_py_node_23644 (http://shadow-bravo:38385/) Subscribers: /sr_hand_robot (http://shadow-bravo:45091/) /rostopic_15687_1526406188893 (http://shadow-bravo:36637/) /record (http://shadow-bravo:35575/)
Example topic message:
data: 0.628318530718
State
/sh_rh_*_position_controller/state
These topics are published at 87 Hz by the driver (/sr_hand_robot node). They contain messages of type control_msgs/JointControllerState, which contain the parameters used for each joints position controller.
Example topic message:
set_point: 1.1113358647 process_value: 1.11095072243 process_value_dot: 0.000426142920695 error: 0.0 time_step: 0.001 command: 0.0 p: -3800.0 i: 0.0d: 0.0 i_clamp: 0.0 antiwindup: False
Force
/sh_rh_*_position_controller/max_force_factor
The /sh_rh_*_position_controller/max_force_factor topic can be published to and scales down the maximum output command of the joints position controller. The output command is interpreted by the driver (/sr_hand_robot node) as PWM if the driver is in PWM mode, or as tendon force if it is in Torque mode. The maximum force is controlled by the parameter “max_force” that is specified in this yaml file. max_force_factor has a value between [0.0, 1.0] and controls the percentage of the max_force that will be effectively considered.
This parameter doesn’t exist in the grasp controller.
PID parameters
/sh_rh_*_position_controller/pid/parameter_descriptions /sh_rh_*_position_controller/pid/parameter_updates
These topics are read-only and contain parameters used for tuning the position controllers. They should not be published directly, but can be accessed through rqt_reconfigure.
TF
/tf
/tf_static
These topics store information on the active transforms in the ROS environment and holds their position and orientation in relation to their parents. Static tfs are fixed and the dynamic tfs update at 100 Hz. They can be published to, as well as read from. For further information on ROS tfs see the ROS wiki.
Mechanism Statistics
/mechanism_statistics
This topic is read-only and updates at 1 Hz with the attributes of each joint, for example:
position: 0.715602037549
velocity: 0.0
measured_effort: -11.088
commanded_effort: -10.799974692
is_calibrated: False
violated_limits: False
odometer: 0.0
min_position: 0.715218542352
max_position: 0.715985532746
max_abs_velocity: 0.0363159179688
max_abs_effort: 15.84
Moveit! Topics
In Position control the Moveit topics are used for trajectory planning. They are described in their documentation here
Collisions
These are used for object collision avoidance if it is active.
/attached_collision_object
/collision_object
Trajectory Execution
Live information regarding the current trajectory execution.
/execute_trajectory/cancel
/execute_trajectory/feedback
/execute_trajectory/goal
/execute_trajectory/result
/execute_trajectory/status
RViz Topics
These topics are used to interface with RViz. Documentation for this can be found here.
/rviz_*/motionplanning_planning_scene_monitor/parameter_descriptions
/rviz_*/motionplanning_planning_scene_monitor/parameter_updates
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full
Using rosservice
To reset individual motors, E.G. RFJ4:
rosservice call /sr_hand_robot/lh/reset_motor_RFJ4
To change control modes, E.G. teach mode:
rosservice call /realtime_loop/xxxxxx